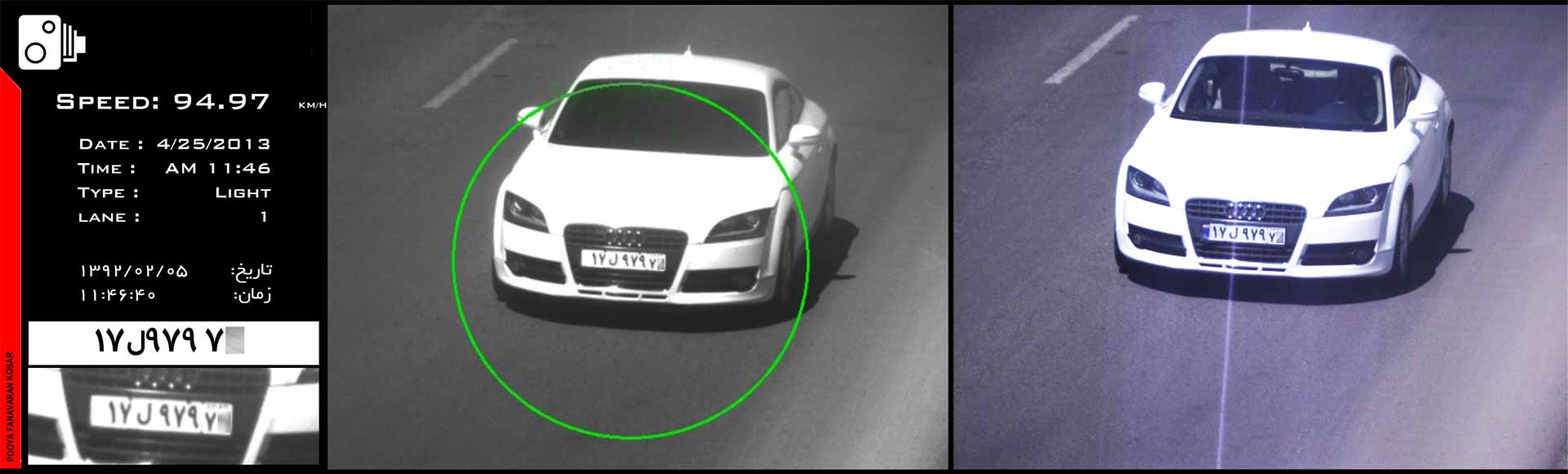






FIXED SPEED CAMERA
- Work in day and night
- Speed extraction and plate reading of all vehicles
- Extraction of Instantaneous, mean speed, and vehicles dimensions
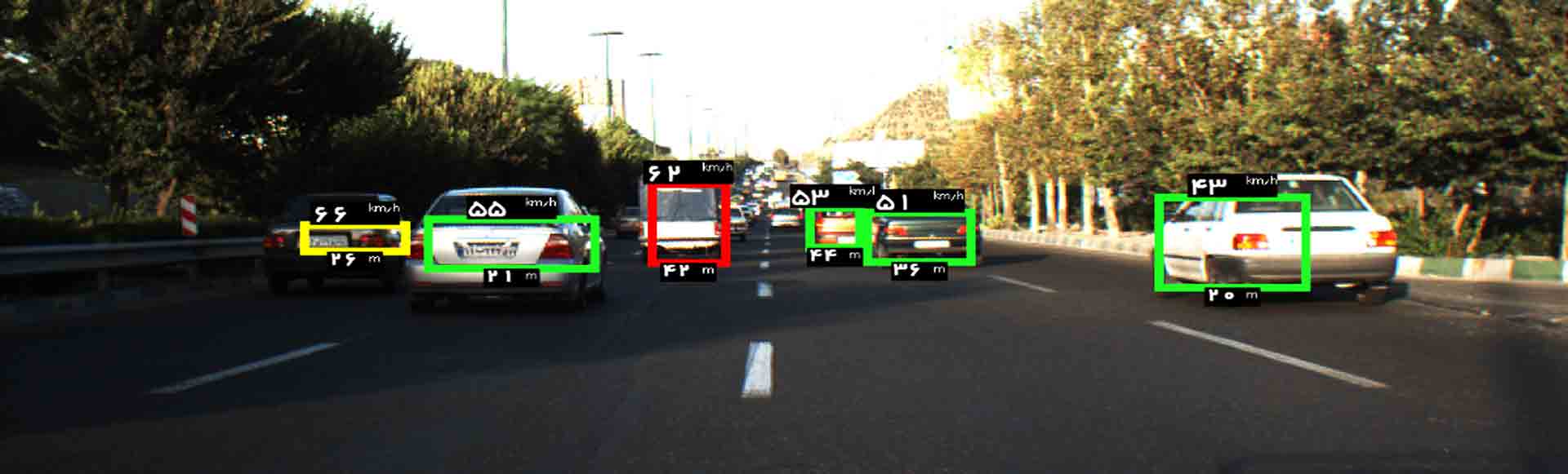
MOBILE SPEED CAMERA
- Completely based on Image Processing
- Speed extraction in mobile and stationary mode
- Recognition and tracking multi targets simultaneously
EMBEDDED ANPR CAMERA
- All in one ANPR (LPR) camera
- Embedded processing
- Low power consumption
- High precision
- Working in all light and weather conditions











